인공지능 공부/Open CV
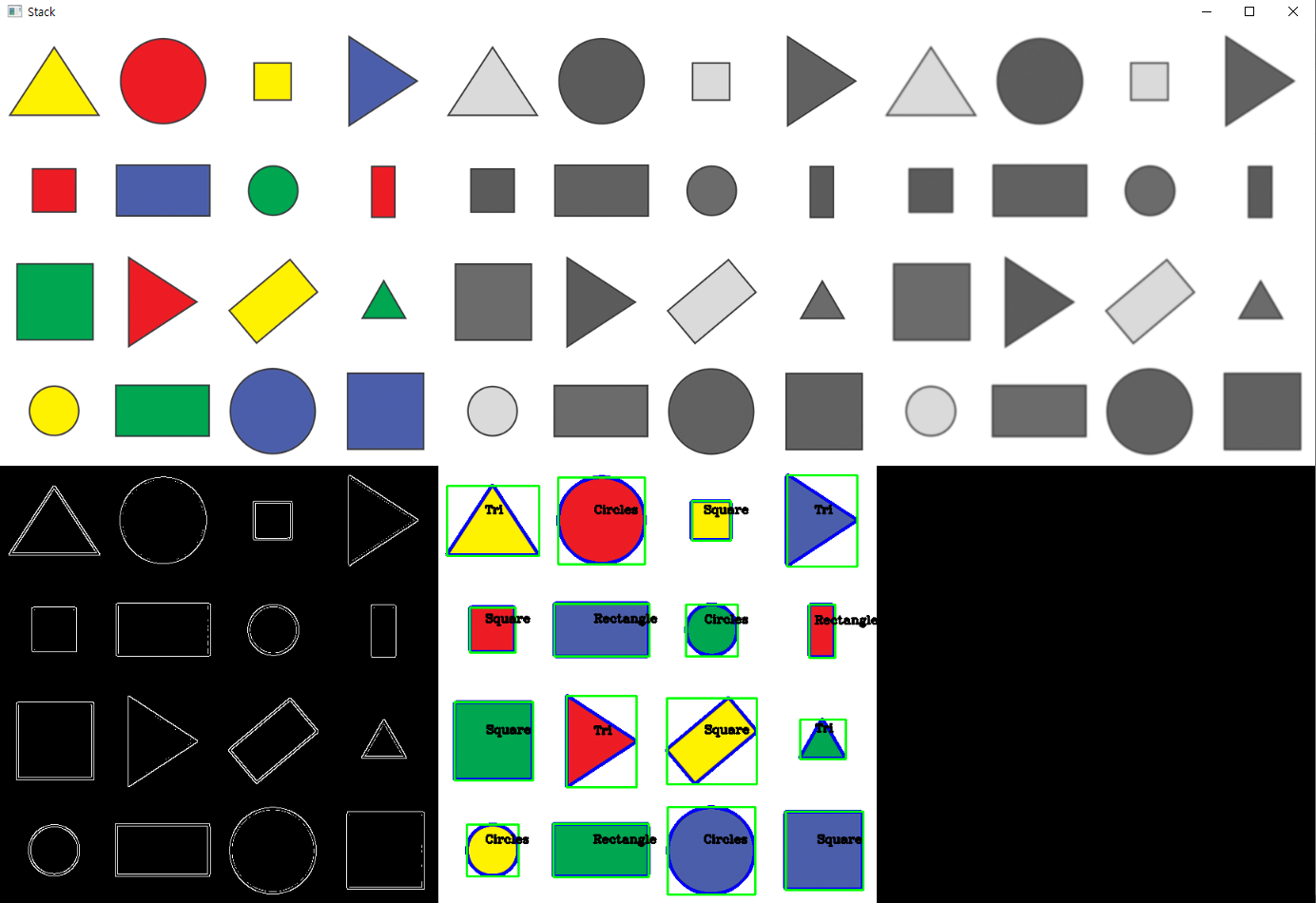
(Open CV) 직사각형, 원, 정사각형, 삼각형 구분짓기
앨런튜링_
2021. 6. 14. 20:18
import cv2
import numpy as np
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
# 이진화(Binary) 이미지 소스로 부터 사물의 외곽 형상을 검출하여, 사물인식에 사용될 수 있습니다. 여기서 이진화 이미지는 GRAY SCALE 또는 HSV SPACE 색으로 변환된 이미지에 대해서 적용 될 수 있습니다.
def getContours(img):
contours,hierarchy = cv2.findContours(img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for cnt in contours:
area = cv2.contourArea(cnt)
print(area)
if area>500:
cv2.drawContours(imgContour, cnt, -1, (255, 0, 0), 3)
peri = cv2.arcLength(cnt, True)
#print(peri)
approx = cv2.approxPolyDP(cnt,0.02*peri,True)
print(len(approx))
objCor = len(approx)
x , y, w, h = cv2.boundingRect(approx)
if objCor ==3:
objectType = "Tri"
elif objCor == 4:
aspRatio = w/float(h)
# 종횡비 입력해주기
if aspRatio >0.95 and aspRatio <1.05:
objectType="Square"
else:
objectType="Rectangle"
elif objCor >4:
objectType="Circles"
else:
objectType="None"
cv2.rectangle(imgContour,(x,y),(x+w,y+h),(0,255,0),2)
cv2.putText(imgContour, objectType,
(x+(w//2)-10,y+(h//2)-10),cv2.FONT_HERSHEY_COMPLEX,0.5,
(0,0,0),2)
path = 'Resources/shapes.png'
img = cv2.imread(path)
imgContour = img.copy()
imgGray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# cv2.GaussianBlur(src, ksize, sigmaX, dst=None, sigmaY=None, borderType=None) -> dst
# • src: 입력 영상. 각 채널 별로 처리됨.
# • dst: 출력 영상. src와 같은 크기, 같은 타입.
# • ksize: 가우시안 커널 크기. (0, 0)을 지정하면 sigma 값에 의해 자동 결정됨
# • sigmaX: x방향 sigma.
# • sigmaY: y방향 sigma. 0이면 sigmaX와 같게 설정.
# • borderType: 가장자리 픽셀 확장 방식.
imgBlur = cv2.GaussianBlur(imgGray,(7,7),1)
# 가장자리 찾기
# cv2.Canny(image, threshold1, threshold2, edges=None, apertureSize=None, L2gradient=None) -> edges
# • image: 입력 영상
# • threshold1: 하단 임계값
# • threshold2: 상단 임계값
# • edges: 에지 영상
# • apertureSize: 소벨 연산을 위한 커널 크기. 기본값은 3
# • L2gradient: True이면 L2 norm 사용, False이면 L1 norm 사용. 기본값은 False.
imgCanny = cv2.Canny(imgBlur, 50,50)
getContours(imgCanny)
imgBlank = np.zeros_like(img)
imgStack = stackImages(0.8, ([img, imgGray, imgBlur],
[imgCanny, imgContour, imgBlank]))
# cv2.imshow("Original", img)
# cv2.imshow("img Gray", imgGray)
# cv2.imshow("img Blur", imgBlur)
cv2.imshow("Stack", imgStack)
cv2.waitKey(0)